Ok, now that you have decided upon what your robot design will be and what weight class you would like to enter, it’s time decide how you would like to make your robot move. The most common method is by using a battery and electric motors. However, I did once see a robot run off of a gas motor. It however, never worked correctly, so I can’t say how it actually performed in a match. Plus, you should check the competitions rules to make sure they allow gas, since that is a fire / explosion hazard.
Anyways back to electric drives. There are two types of electric motors that you could use. These are AC (alternating current) or DC (direct current) motors. I highly suggest you stick with DC motors since batteries transmit a DC current and if you got an AC motor you would have to convert the DC current into an AC current going into the motor and the AC back to DC as it goes back into the battery. Leaving it at that and if you take my suggestion, there are two types of DC motors to choose from, brushed and brushless motors.
Brushed Motors
Let me first talk about brushed motors because they have been around the longest. Basically what a brushed motor is, is it consists of two magnets attached to the outside walls of the casing. Inside that are two sets of coiled wires opposite of one another. They are charged to act as an electromagnet where one set of wires will have a positive charge and the other set will have negative charge. In addition to this there is a mechanical rotary switch inside that will switch the charge on each of these electromagnets every time a brush comes in contact with them. By switching the charge the motor will rotate. The strength of magnetic pull going through wire coils is based off of the voltage going through them.
There are few reasons why you may want to choose a brushed motor instead of a brushless motor. First, brushed motors only have two wires needed to control them. One wire being your positive end and the other your negative. By have a two wire connection, you don’t actually need a speed controller to use these motors, though you will have to get one anyways. These motors also are cheaper then brushless motors, and won’t have to be geared down as much as brushless motor, since there rpm at full speed is normally lower than brushless motors.
The cons of using a brushless motor are as follows. Your torque is based off of the voltage going into these motors, meaning to go slower you are actually decreasing your torque since voltage has to decrease to make these motors spin at a lower rpm. Also, while talking about voltage, to decrease the voltage you will have to use a speed controller that will basically increase the resistance on the current to lower the voltage. This actually is not a very efficient, and because of this your battery will not last as long on a brushed motor. Plus, due to the mechanics of this motor there is a lot more friction within brushed motor then there is a brushless motor. That friction will wear the motor out faster as well as cause the motor to draw even more power from you battery.
| -Two Wires
-Low Cost-Less Gearing |
-Not efficient with power consumption from the battery
-Torque output to weight ratio in comparison to a brushless motor is not as good -Speed is controlled by voltage input |
Brushless Motors
Unlike brushed motors brushless motors do not use mechanical brushes to reverse the electromagnetic field. Instead brushless motors use three driving coils. As the motor rotates, devices inside the motor will sense its position, which will then activate the coils to pull the internal magnet inside the motor. Do to this fact this is completely a computerized process, and an electronic speed controller made for brushless motors must be used to control the motor.
The pros of a brushless motor easily out weights the pros of a brushed motor. For one, brushless motors produce a much high torque to weight ratio, and can spin at much higher RPMs then a brushed motor can. Also, since the speed is controlled by a micro processor in the speed controller instead of directly by voltage, these motors are much more efficient, which will result in longer battery life. Finally, these motors can produce their maximum torque at zero RPM, meaning they can be used as brake. Brushed motors on the other hand have to reverse direction or have and internal brake inside of them.
The cons of brushless motors are mainly the cost. Brushless motors in general are more expensive then brushed motors. Also, you are required to buy a speed controller made specifically to control brushless motors. These speed controllers can also be quite costly in comparison to a speed controller used for brushed motor.
| -high torque to weight ratio
-high RPMs-help batteries last longer -Brushless motors can hold their maximum torque and not rotate |
-cost-required to buy a speed controller to control the motor |
How to Pick Your Motor
So how do you pick your motor? Well it depends on what you want that motor to do, how much weight you have spare, space you have inside your robot, and of course what you can afford. How much weight, space inside your robot, and cost you will have to figure out as you progress through your design. However, what you want that motor to do you should figure out first so that you know what type of motor you should look at Basically, you need to decide how much torque you want that motor to be able to deliver, and how much power that motor has.
Torque and Power
First let me talk about torque. Torque is a rotational force that you could see in a series of different units. I’m going to discuss torque in the unites of in-lb. Notice in those units there is unit of length and a unit for force. That unit of length represents how the force is effects by distance from the axis of rotation. Refer to the figure below.
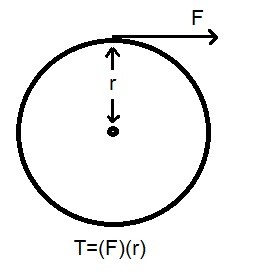
So what all of this means is say you have motor that can deliver 10 in-lb of torque. If you attach a wheel to that motor that has a diameter of 1 inch the force on the outside edge of that wheel will produce 20 lb of force since you would divide the motors torque by the wheels radius. Now if you increase the wheels diameter to 2 inches the force produced at the circumference of the wheel will be 10 lb.
Power on the other hand is the product toque and angular velocity. Refer to the equation below to calculate power.
$power=\frac{π}{30}(torque)(RPM)$, resulting units $\frac{in·lb}{s}$
$1hp=6600\frac{in·lb}{s}$
$1W=1\frac{N·m}{s}$
Now if you gear your motor down you will increase its torque but the power of the motor is unaffected by gearing a motor down if you don’t consider losses due to friction within the gearing.
Determining a Drive Motor
You can use the information above to help you select a drive motor or a motor for a rotating weapon. I’m first going to discuss selecting a drive motor. To do this you need to know how fast you want your robot to accelerate and what its maximum speed is. The maximum speed is up to you to determine. Once you know what your maximum speed is you need to decide how fast you want it to reach this speed. To do this you need to know the mass of your robot. If you are measuring your weight in pounds divide that number by 32.2 to obtain its mass.
$mass=\frac{wieght (pounds)}{32.2}$
Once you know what the robots mass is you can determine the required to torque to cause the robot to accelerate in a set amount of time by using the following equation.
$torque = (wheel~radius)mass$$\left(\frac{maximum~velocity}{time}\right)$
When you use the equation above you must watch your units. For example if you want your torque to be in the units in-lb then your wheel radius should be in inches, your mass will be in slugs, your maximum velocity will be in inches/second, and time will be in seconds.
Finally, you want to be careful about that you don’t cause your wheels to slip. This means you don’t want to have the wheels deliver a torque that would cause the force delivered by those wheels to overcome the forces due to friction. It is possible to calculate the force due to friction; however, since each arena has its own surface and this surface will change as the competition goes, I would use 20 to 35% of the robots weight to roughly calculate your friction force. To calculate the force delivered by your wheels use the equation below.
$force=\frac{torque}{wheel~radius}$
Determine a motor for a Rotating Weapon
When determining a motor for a rotating weapon you need to choose a motor that can produce enough torque to overcome the weapons resistance to rotate. The objects resistance to rotation is called the mass moment of inertia. There are different methods to calculate the mass moment of inertia you can use this general equation.
$mass~moment~of~indertia =$$(weapons~mass)$$(weapon~radius)^2$
There are additional equations that can be used to calculate a more accurate mass moment of inertia. These equations can be found here. Also, if you are using a design software to help you design your robot, you could check and see if that software has the capability of calculating the mass moment of inertia.
Once you have calculated your mass moment of inertia, you know what your desired RPM is, and you know the time that you want it to reach that RPM, you can use the following equation to calculate the necessary torque applied to the weapon.
$torque = \frac{π}{30}$$(mass~moment~of~inertia)$$\left(\frac{RPM}{time}\right)$
As with the equation used to determine the torque for your drive motors, it is important that you keep your unit straight when using this equation. If you want your torque to be in the units in-lb, then your mass moment needs to be in slugs-in2, and the time needs to be in seconds.